
The visual hull is a geometric entity that allows understanding capabilities and limits of the techniques for comparing or reconstructing non-convex 3D shapes using silhouettes or shadows. Broadly speaking, the visual hull VH(O,VR) of an object O relative to a viewing region VR of R3 is the largest object that produces the same silhouettes (or shadows) as O observed from viewpoints (lighted from point light sources) belonging to VR. The visual hull is also the closest approximation of O that can be obtained by volume intersection from silhouettes (or shadows) obtained with viewpoints (or point light sources) belonging to VR. All the visual hulls relative to viewing regions which: 1) completely enclose O; 2) do not share any point with the convex hull of O; are equal. This is the external visual hull of O, or simply the visual hull VH(O). If the viewing region is bounded by the object O itself, we have the internal visual hull IVH(O). The external visual hull is relevant to most practical situations.
We have developed:
A. Bottino, A. Laurentini
Retrieval of shape from silhouettes
In Advances in Imaging and Electron Physics, Academic Press
ISBN: 0-12-014781-5, 296 pages, 2006
A. Bottino, A. Laurentini
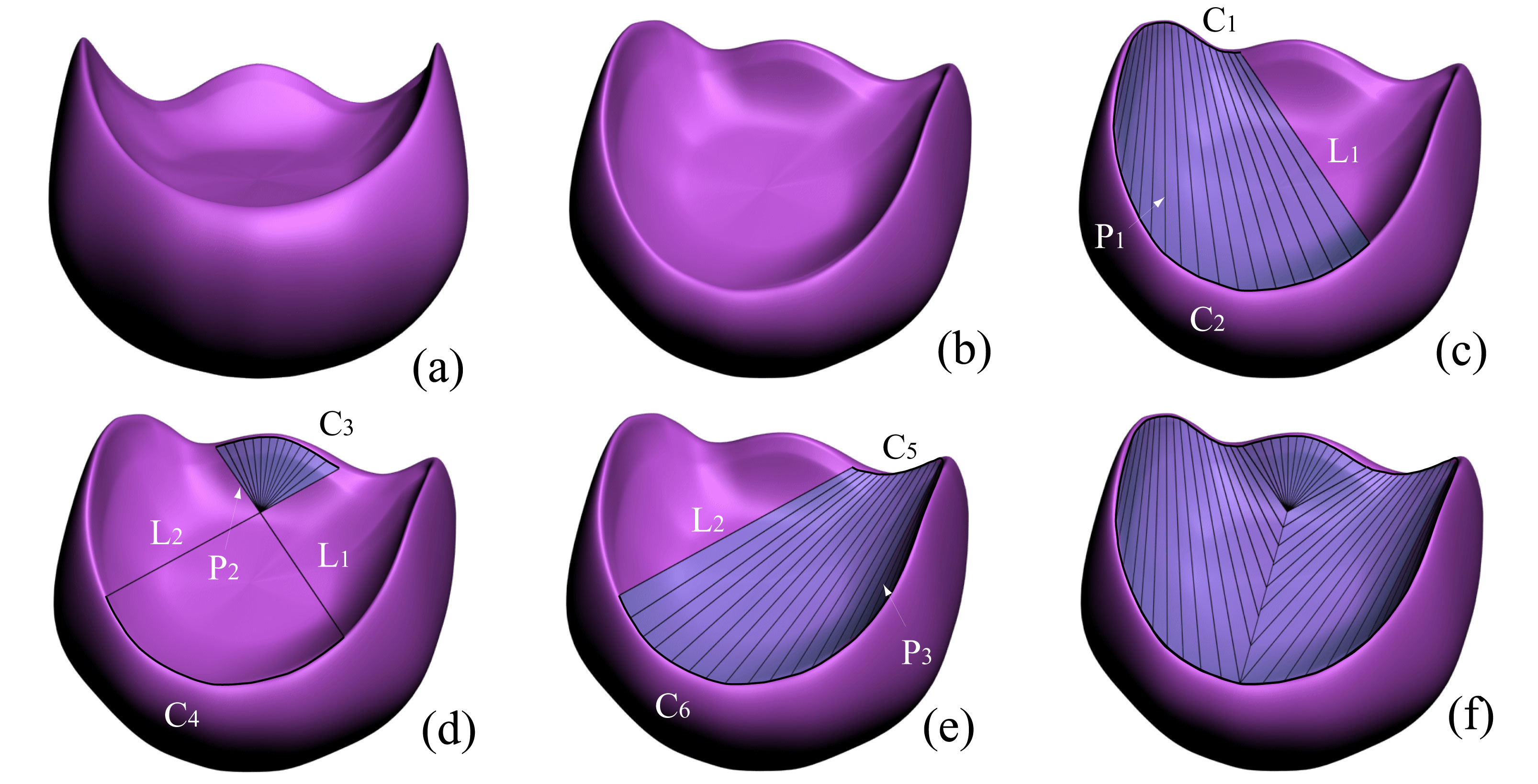
The visual hull of piecewise smooth objects
Computer Vision and Image Understanding,Volume 110, Issue 1, April 2008, Pages 7-18. (DOI)
A. Bottino, A. Laurentini
What's NEXT? An Interactive Next Best View Approach
Pattern Recognition, Vol. 39 (1), Jan. 2006, Pages 126-132
(DOI)
A. Bottino, A. Laurentini
The Visual Hull of Smooth Curved Objects
IEEE Transactions on Pattern Analysis and Machine Intelligence, Vol. 26, No.
12 , Dic. 2004, pp. 1622-1632 (PDF)
(DOI)
A. Bottino, A. Laurentini
Introducing a New Problem: Shape-from-Silhouette when the Relative
Positions of the Viewpoints is Unknown
IEEE Transactions on Pattern Analysis and Machine Intelligence, Vol. 25, No.
11 , Nov. 2003, pp. 1484 -1493 (PDF)
(DOI)
A. Laurentini
Topological Recognition of Polyhedral Objects from Multiple Views
Artificial Intelligence, 127 (1) (2001) pp. 31-55 (PDF)
A. Laurentini
Computing the Visual Hull of Solids of Revolution
Pattern Recognition, Vol.32, N0.3, 1999
A. Laurentini
How many 2D silhouettes does it take to reconstruct a 3D object?
Computer Vision and Image Understanding,Vol. 67, No.1, July 1997
A. Laurentini
Comments on'Efficiently Computing and Representing Aspect Graphs
of Polyhedral Objects'
IEEE Trans. Patt. Anal. Machine Intell.,Vol.18, No.1,1996 (PDF)
A. Laurentini
Surface Reconstruction Accuracy for Active Volume Intersection
Pattern Reco. Letters, Vol.17, 1996
A. Laurentini
How far 3D shapes can be understood from 2D silhouettes
IEEE Trans.Pattern Anal. Machine Intell.,Vol.17, No.2, February 1995 (PDF)
A. Laurentini
The Visual Hull Concept for Silhouette-Based Image Understanding
IEEE Trans.Pattern Anal. Machine Intell.,Vol.16, No.2, February 1994 (PDF)
Copyright © 2007 - All Rights Reserved
CG&VC @ Politecnico di Torino